1. Łączenie się ze
sterownikiem DVP12SE
Uruchamiamy program COMMGR i tworzymy nowy sterownik. W opcji „Connection Setup” wybieramy interfejs komunikacyjny którego aktualnie używamy. Następnie wybieramy naszą kartę sieciową i klikamy na przycisk „Search”. W oknie poniżej powinno wyszukać sterownik.

Klikamy „OK”.
Następnie uruchamiamy program „Delta DCISoft”. Wchodzimy w opcje „Communication Settings” w menu „Tools”. Następnie konfigurujemy wszystko dla naszego interfejsu komunikacyjnego podobnie jak w poprzednim programie. Klikamy ikonkę „Search”. Po chwili powinno wykryć nasz sterownik.
 Jeśli klikniemy 2 razy na
nasz sterownik to otworzy się okno w którym można zobaczyć
podstawowe informacje o sterowniku. Po przejściu do zakładki
„Basic” możemy zmienić konfigurację sieci (adres IP, maskę,
bramę itp). W tym momencie warto uruchomić wiersz poleceń w naszym
komputerze i wywołać polecenie „ipconfig”. Patrzymy na adres
który został wypisany pod opcją „Ethernet adapter”.
Jeśli klikniemy 2 razy na
nasz sterownik to otworzy się okno w którym można zobaczyć
podstawowe informacje o sterowniku. Po przejściu do zakładki
„Basic” możemy zmienić konfigurację sieci (adres IP, maskę,
bramę itp). W tym momencie warto uruchomić wiersz poleceń w naszym
komputerze i wywołać polecenie „ipconfig”. Patrzymy na adres
który został wypisany pod opcją „Ethernet adapter”.

Wracając do okna „Basic” w programie „Delta DCISoft” wpisujemy adres IP dla sterownika. Należy wpisać taki sam adres jaki wyświetliło w cmd, wystarczy zmienić tylko ostatnią liczbę, maskę przepisujemy w niezmienionej formie. Po wpisaniu zmian klikamy „Zastosuj”.

Po każdej takiej zmianie należy również wpisać zmienione wartości w konfiguracji sterownika w programie „COMMGR”.
Uruchamiamy program WPLSoft. Ustawiamy odpowiednie opcje w ustawieniach komunikacji. Port zostawiamy 502, typ komunikacji ustawiamy zgodnie z interfejsem komunikacyjnym którego aktualnie używamy, wybieramy także kartę sieciową.

Następnie klikamy ikonkę „Auto Search Ethernet Module”.

Po chwili program sam wyszuka podłączony sprzęt i pojawi się nowa ikona w drzewku po lewej stronie programu. Widzimy tam jaki adres IP ma nasz sterownik.

Następnie po raz kolejny uruchomiamy okno ustawień i wpisujemy adres sterownika w oknie „Assign IP” oraz zaznaczamy checkboxa po lewej stronie.

Następnie klikamy opcję „Read from PLC”. W okienku które wyskoczy klikamy „OK”
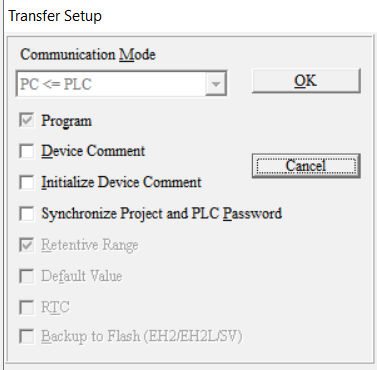
Po chwili wyświetli się komunikat „communication completed”. Następnie wyświetlą się nowe okna i nowe ikony. Można teraz napisać program w języku LAD lub w języku IL.
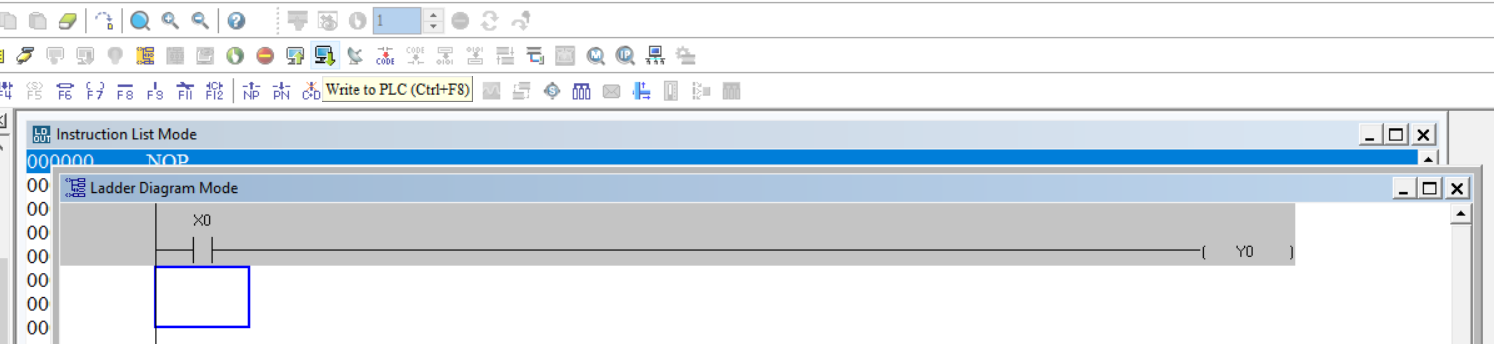
Można teraz dla testu wgrać przykładowy program który będzie włączał dane wejście w zależności od stanu na wyjściu. Po napisaniu programu klikamy „Write to PLC” aby wgrać program do sterownika.
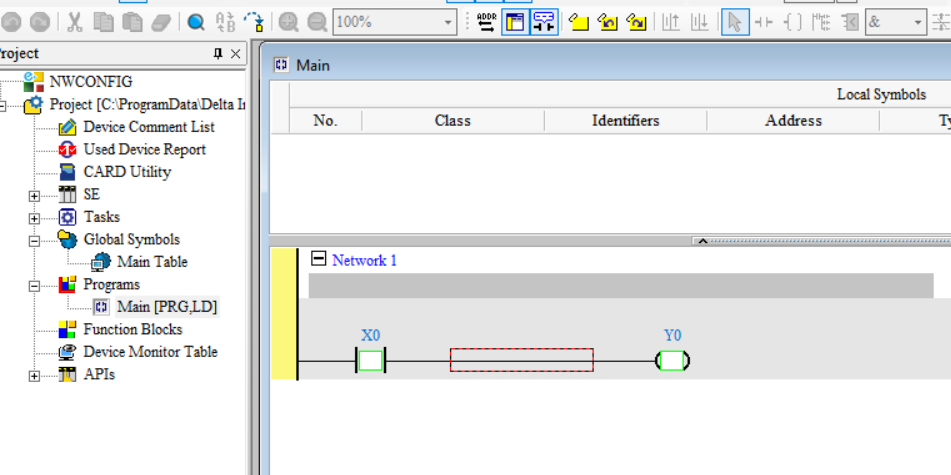
Jednakże, większe możliwości zapewnia program „Delta ISPSoft”, dlatego lepiej pisać w nim programy. Można w nim także testować programy w opcji „Online”. Tworzymy więc nowy projekt w „ISPSoft” i wybieramy jako urządzenie nasz sterownik. Następnie zmieniamy ustawienia komunikacji podobnie jak w poprzednich programach. Dodajemy nowy program klikając prawym przyciskiem myszy na „Programs” i następnie „New”. Wybieramy język LD i klikamy „OK”. Następnie tworzymy prosty program i klikamy „PLC”, potem „Online mode”. Teraz możemy testować nasz program.
Klikamy ikonę „Set MPU X ON/Off” aby możliwe było symulowanie wejść.
Klikamy na styk X0 prawym przyciskiem myszy i wybieramy opcję „Set on”.
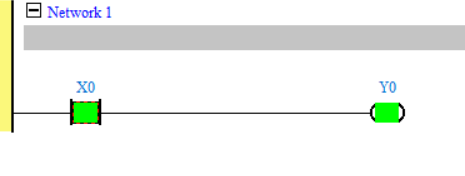
Po tej operacji można zauważyć że zaświeciła się dioda informująca o wysokim stanie na wyjściu sterownika.
2. Wbudowane funkcje i zmienne w sterowniku
Sterownik DVP-12SE udostępnia wiele wbudowanych zmiennych i funkcji z których można skorzystać. Najważniejsze z nich to:
-generatory przebiegu prostokątnego (M1011-10ms, M1012-100ms, M1013-1s,M1014-1min)
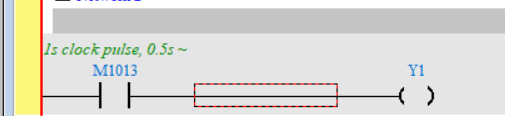
Po wywołaniu wyjście Y1 będzie migało z częstotliwością 1s.
-zmiana rozdzielczości timerów(T64 do T126) – M1028. Jeśli ustawimy ten bit na stan wysoki to timery będą miały rozdzielczość 10ms, w przeciwnym wypadku 100ms
-wyłączenie wszystkich wyjść – bit M1034
-możliwość podłączenia sygnału RUN/STOP po wejście X7- bit M1035
- zmiana rozdzielczości timerów(T200 do T255) – M1028. Jeśli ustawimy ten bit na stan wysoki to timery będą miały rozdzielczość 1ms, w przeciwnym wypadku 10ms
- odblokowanie możliwości monitorowania alarmu –bit M1049
-wyłączenie obsługi przerwań –bity od M1050 do M1057
-podgląd statusu sterownika (STOP/RUN, stan wysoki-ON)- bit M1072
-zmiana częstotliwości sygnału PWM dla wyjścia Y1 –bit M1070 , dla wyjścia Y3-bit M1071, dla wyjścia Y0- bit M1112, dla Y2- bit M1113(stan wysoki -100us, stan niski -1ms)
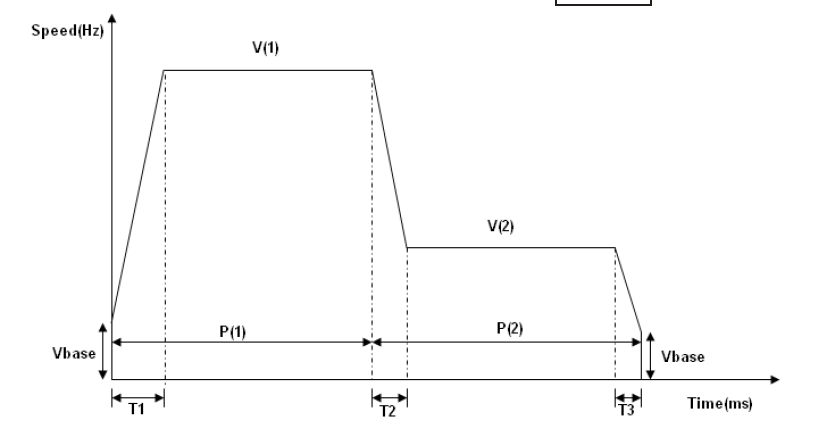
- odblokowanie możliwości używania funkcji 2 prędkości DDRVI/DDRVA –bit M1119
Przykład użycia 2 prędkości DDRVI/DDRVA
- przełączanie pomiędzy trybem 16-bitowym a 8-bitowym(stan wysoki- tryb 8-bitowy) – bit M1161
- odblokowanie możliwości używania instrukcji komunikacji dla falowników z serii delta VFD (stan wysoki –falowniki VFD-A, stan niski- falowniki VFD pozostałych serii) – bit M1177
- odblokowanie/zablokowanie funkcji automatycznego mapowania kiedy sterownik połączony z lewostronnymi modułami (stan wysoki – automatyczne mapowanie wyłączone) – bit M1182
-ustawianie trybu zliczania liczników C200-C231 (stan wysoki – liczniki zliczają w dół) – bity M1200-M1231
-ustawienie trybu zliczania szybkich liczników C232-C242 (stan wysoki – liczniki zliczają w dół) – bity M1232-M1242
-ustawienie wejścia X7 jako sygnału resetującego liczniki sprzętowe C235-C241 – bit M1260
- zmiana kierunku zbocza (narastające/opadające) dla przerwań systemowych I000/I001 – bit M1280, I1400/I1401 – bit M1284, I600/I6001 –bit M1286
- odblokowanie możliwości wymuszania wartości na wejściach X – bit M1304
- odblokowanie możliwości połączenia PLC LINK(połączenie to pozwala na komunikację kilku sterowników w trybie Master-Slave) – bit M1350
- odblokowanie przyśpieszenia przesyłania danych przez Ethernet – bit M1590
3. Specjalne rejestry danych
-aktualny czas cyklu programu (w jednostkach 0.1ms) – D1010
- aktualna liczba modułów wejścia/wyjścia –D1140
- wartość prędkości VR0, VR1 – D1178, D1179
- aktualna wartość sekund, minut, godzin, dni, miesięcy, tygodni oraz rok dla zegara czasu rzeczywistego – (D1313, D1314, D1315, D1316, D1317, D1318, D1319)
4. Obsługa przerwań w DVP12SE
Aby program nie wykonywał się cyklicznie, tylko w reakcji na jakieś zdarzenie, należy użyć przerwań. W tym celu tworzymy nowy program i wybieramy opcję „External Interruption”.
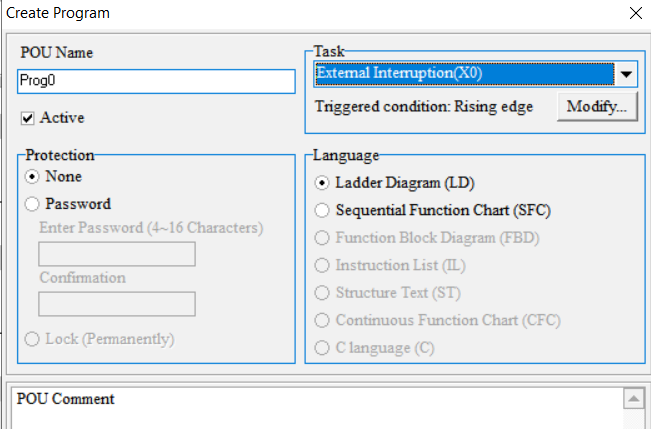
Program może się wywołać w wyniku wystąpienia złącza narastającego lub opadającego na którymś z wejść cyfrowych, upływu konkretnego czasu („Timed Interruption”), gdy wybrany przez nas licznik doliczy do konkretnej wartości („High Speed Count Interruption”), lub po przesłaniu konkretnego komunikatu na złączu RS („Communication Interruption”).
Następnie należy dodać w programie blok EI który pozwala na przerwanie głównego programu.

Jeżeli chcemy uniemożliwić użycie przerwań, możemy dodać blok DI który wyłączy obsługę przerwań.
5. Specjalne bity M oraz rejestry D.
Bity:
M1000 - przyjmuje wartość 1 gdy sterownik jest w trybie „ON”
M1001 – działa przeciwnie do M1000
M1002 – przyjmuje wartość 1 tylko w czasie pierwszego cyklu po przejściu sterownika w tryb „ON”
M1003- przyjmuje wartość 0 tylko w czasie pierwszego cyklu po przejściu sterownika w tryb „ON”
M1015 – aktywacja szybkiego timera
M1025 – bit będzie miał wartość 1 gdy PLC otrzyma błędne zapytanie w trakcie komunikacji pomiędzy PC lub HMI
M1034 – po ustawieniu na 1 wyłącza wszystkie wyjścia
M1138,M1139 – ustawienia komunikacji portu COM1 (pierwszy bit – podtrzymanie ustawień komunikacji, drugi – wybór trybu ASCI/RTU)
M1120,M1143 – ustawienia komunikacji portu COM2, podobnie jak wyżej
M1136,M1320 – ustawienia komunikacji portu COM3, podobnie jak wyżej
M0137 – zezwala na użycie instrukcji SPD (detekcja prędkości)
M1039 – po ustawieniu tego bitu na 1 możemy określić czas cyklu w rejestrze D1039
M1067,M1068 – wskazują błędy w programie
Rejestry:
D1000 – przechowuje maksymalny czas cyklu. Początkowa wartość wynosi 200ms. W przypadku gdy nasz program jest skomplikowany, można zwiększyć tą wartość
D1002 – przechowuje pojemność programu (maksymalną liczbę instrukcji)
D1015 – aktualna wartość czasu jaki odliczył szybki timer
D1018,D1019 – przechowują 32-bitową wartość liczby π
D1020 – pozwala zmienić czas odczytania impulsów na wejściach cyfrowych (domyślnie 10ms, można ustawić od 0-20ms, w przypadku ustawienia 0 czas będzie wynosił 50 µ s)
D1025 – przechowuje kod błędu dla komunikacji pomiędzy PLC a HMI lub PC
D1121 – adres slave dla COM1/COM2
D1255 - adres slave dla COM3
D1037 –określa w których rejestrach zapisywana jest prędkość odczytana przy pomocy funkcji SPD. Jeżeli np. przypiszemy mu wartość 100 to wtedy odczytana prędkość będzie zapisana pomiędzy D101 a D108 ( w zależności od tego ilu instrukcji SPD użyliśmy np. dla pierwszej instrukcji wartość prędkości będzie w D101)
D1039 – może być użyty aby określić konkretny czas cyklu
D1067 – kod błędu przy wykonywaniu programu
D1068 – adres błędu
D1240-D1243 - sterownik zapisze w tych rejestrach aktualne wartości szybkich liczników w przypadku wystąpienia przerwania
6. Niektóre instrukcje możliwe do użycia w programie:
REF – pozwala odświeżyć wartości na wybranych wejściach, przydaje się w przypadku długiego programu
SPD- wspomniana wyżej detekcja szybkości
PWM,GPWM – pozwala generować przebieg prostokątny o różnym wypełnieniu
SORT(16-bit)/DSORT(32-bit) – sortowanie danych rosnąco
PID (16-bit)/DPID(32-bit) – blok regulatora PID
MODRD – odczytanie danych przesyłanych za pomocą protokołu MODBUS
MODWR – wysłanie danych przesyłanych za pomocą protokołu MODBUS
RAND – generuje losową liczbę
ABS – wylicza wartość bezwzględną dla liczby
PLSY – generowanie impulsów na wyjściu, możemy zadać ile impulsów ma zostać wygenerowanych.
W zależności od tego jakich funkcji wyjściowych będziemy używać na chwilę obecną producent proponuje dwa sterowniki plc. Pierwszy DVP-12SE11T z wyjściami tranzystorowymi NPN, lub DVP-12SE11R z wyjściami przekaźnikowymi.